Motivation
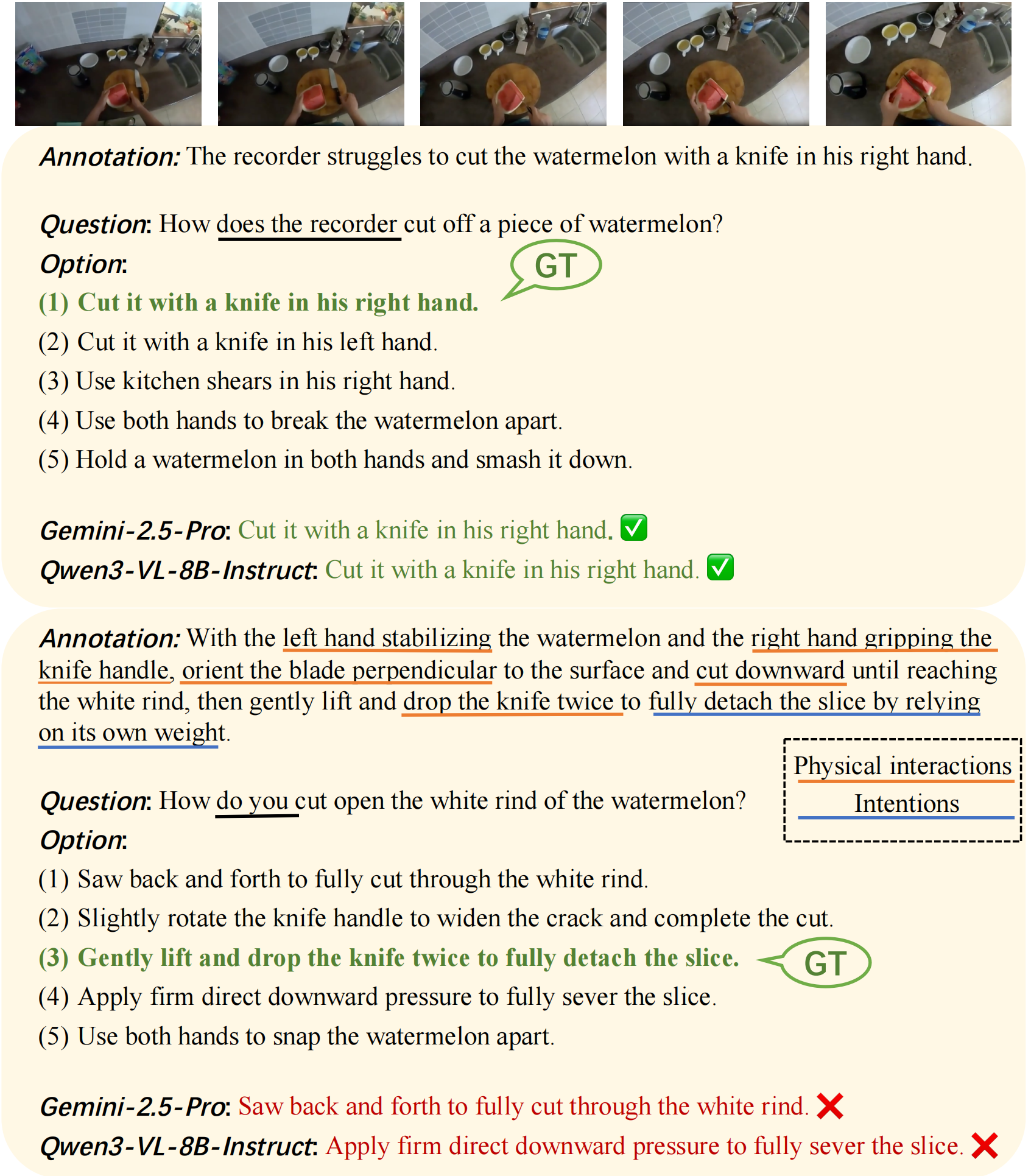
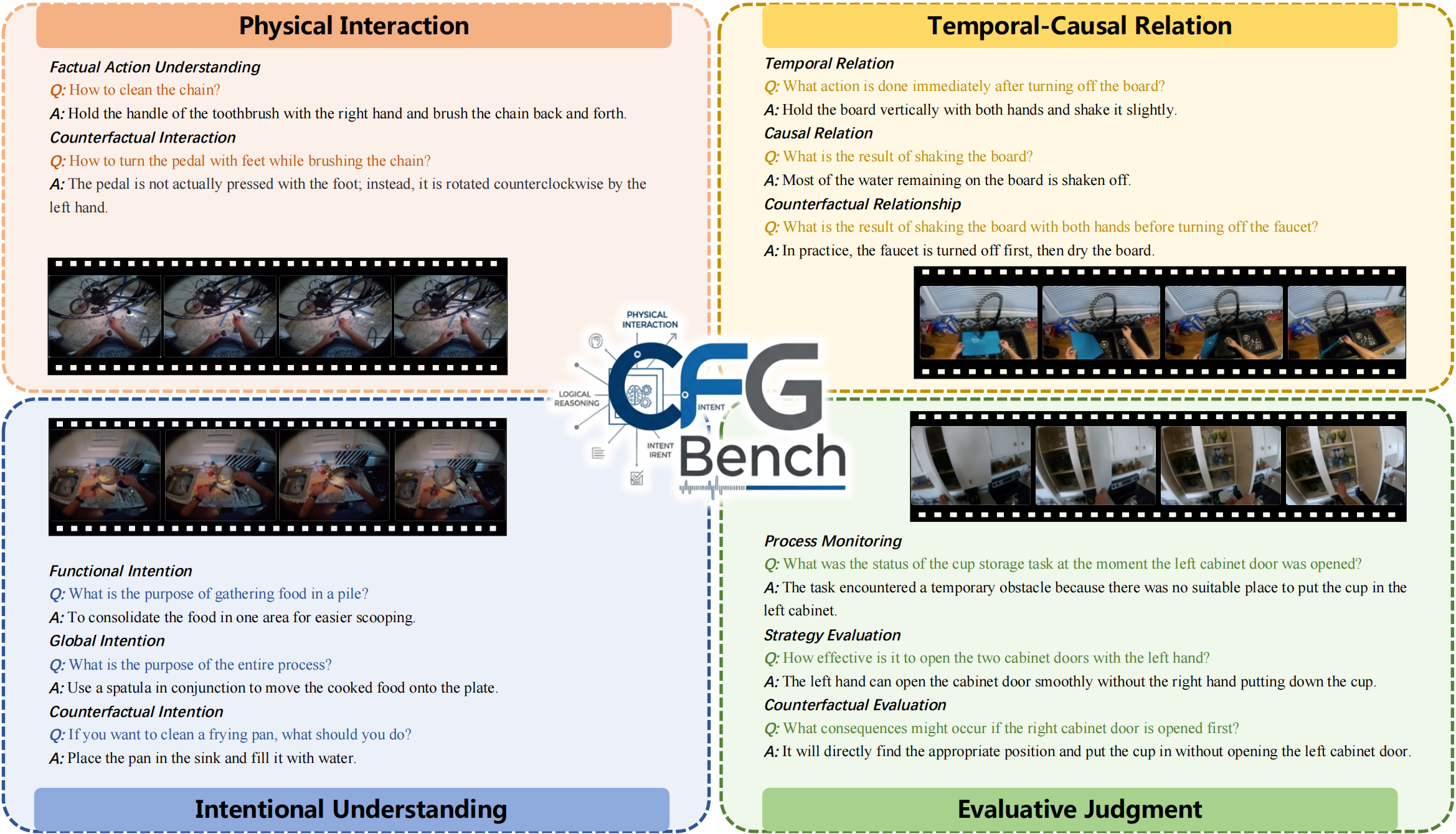
Illustration of CFG-Bench's focus on embodied intelligence over descriptive accuracy. The top part shows how FAVOR-Bench annotates and questions from a third-person perspective, a task which current MLLMs can often solve. In contrast, the bottom part demonstrates CFG-Bench's fine-grained annotation and first-person scenario questions, which probes for the actionable physical and intentional details necessary for embodied agents. Current MLLMs struggle to master the crucial fine-grained details required for physical interaction.